[Imagem: Tianqi Yue et al. - 10.1038/s41467-024-48293-2]
Um robô, projetado para imitar o movimento de lesmas e caracóis, pode mudar o modo como são feitas inspeções em lugares de difícil acesso.
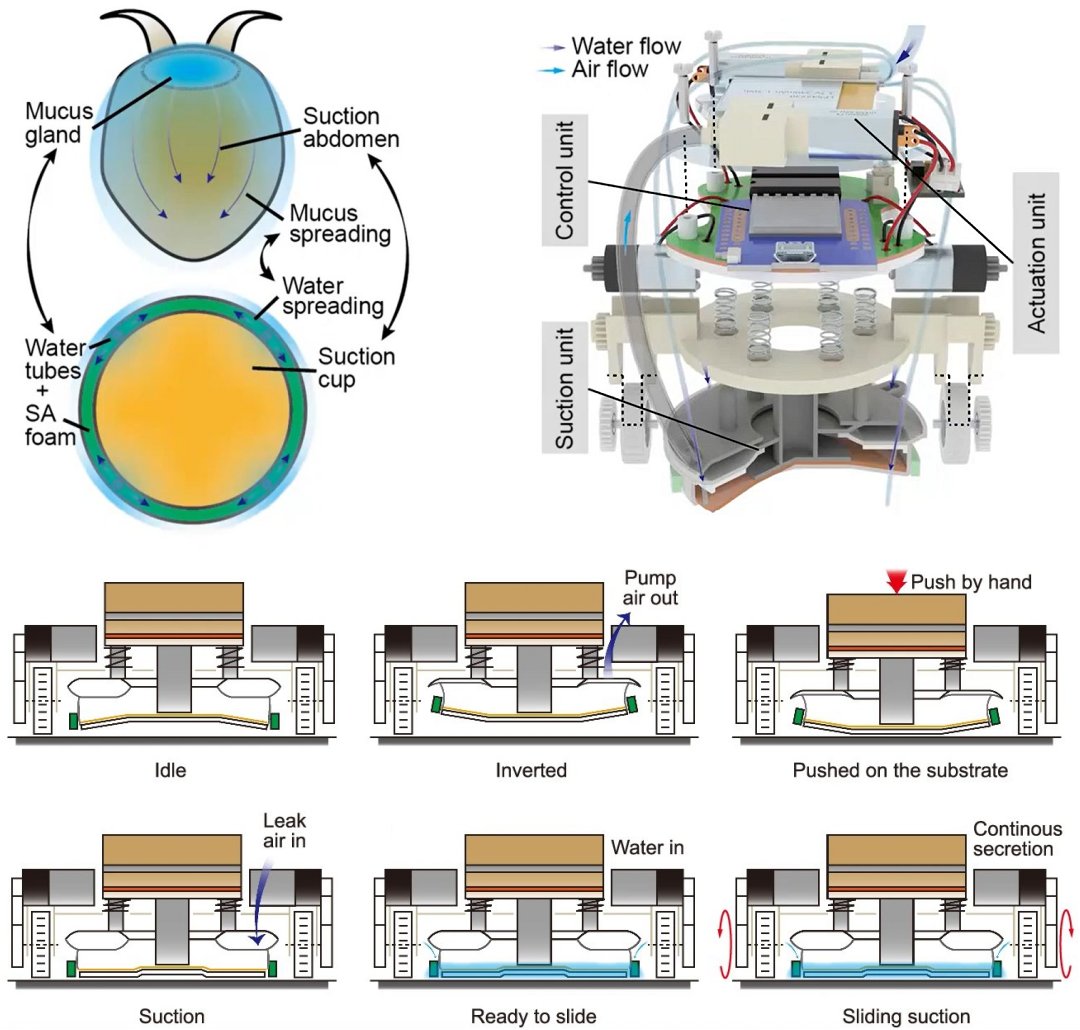
Os caracóis deslizam de forma estável através de uma superfície com apenas uma única ventosa com grande capacidade de sustentação de carga, o que serviu de inspiração para a criação de um mecanismo de locomoção adesivo.
Esta nova maneira de os robôs escalarem paredes e superfícies de difícil acesso poderá ser usada na prática para inspecionar pás de turbinas eólicas, cascos de navios, aviões, janelas de vidro de arranha-céus e muito mais, tudo de forma autônoma.
Um mecanismo de sucção deslizante, que permite ao robô deslizar sobre a água, substitui o muco do caracol, que também funciona como adesivo para mantê-lo sobre as superfícies. Isso dá ao sistema de sucção deslizante um grande potencial para aplicações em outros campos da robótica, incluindo garras industriais, escalada, atividades ao ar livre e transporte.
"As pessoas sabem que os caracóis têm um comportamento de deslizamento adesivo estável, mesmo que carreguem uma carga pesada, neste caso uma concha. Inspirados nisso, apresentamos um mecanismo de 'sucção deslizante' e desenvolvemos um robô de sucção deslizante, que alcançou capacidade de deslizamento comparável à dos caracóis," disse Tianqi Yue, da Universidade de Bristol, no Reino Unido.
Forte, eficiente e limpo
O fator crítico para o comportamento de sucção deslizante dos caracóis é a secreção de muco, que reduz o atrito e aumenta a sucção.
Para simplificar as coisas, a equipe usou água como um muco artificial barato, de fácil acesso e limpo para ajudar o robô a deslizar enquanto a sucção está ligada.
Eles otimizaram os materiais da ventosa e projetaram o sistema mecatrônico tendo em vista aplicações práticas. O protótipo carregou uma massa de 200g e apresentou grande destreza em evitar obstáculos. Mas ele é muito mais forte, demonstrando capacidade de deslizamento carregando uma massa de 1 kg, dez vezes mais pesada que ele, em trechos menos complicados.
A sucção deslizante permite que o robô deslize verticalmente e até de cabeça para baixo, atingindo altas velocidades ou suportando cargas elevadas, com a vantagem de não requerer energia durante a adesão estática.
"Através do desempenho do robô de sucção deslizante, demonstramos que a sucção deslizante oferece baixo consumo de energia, alta eficiência e segurança de adesão, alta capacidade de carga e baixa complexidade, deixando apenas um rastro de água de rápida evaporação. A descoberta mais emocionante da nossa pesquisa é que o mecanismo de sucção deslizante proposto é uma nova estratégia de escalada limpa e irá avançar significativamente no desenvolvimento da próxima geração de robôs de escalada," concluiu Tianqi.
Link do vídeo demonstrando o funcionamento do projeto:
Bibliografia:
Artigo: Snail-inspired Water-enhanced Soft Sliding Suction for Climbing
Autores: Tianqi Yue, Hermes Bloomfield-Gadêlha, Jonathan Rossiter
Revista: Nature Communications
Vol.: 15, Article number: 4038
DOI: 10.1038/s41467-024-48293-2



